ir3
-
Posts
336 -
Joined
-
Last visited






-
 GrandpaPhil reacted to a post in a topic:
WTS: Proxxon Woodturning Lathe and Proxxon Drill Stand
GrandpaPhil reacted to a post in a topic:
WTS: Proxxon Woodturning Lathe and Proxxon Drill Stand
-
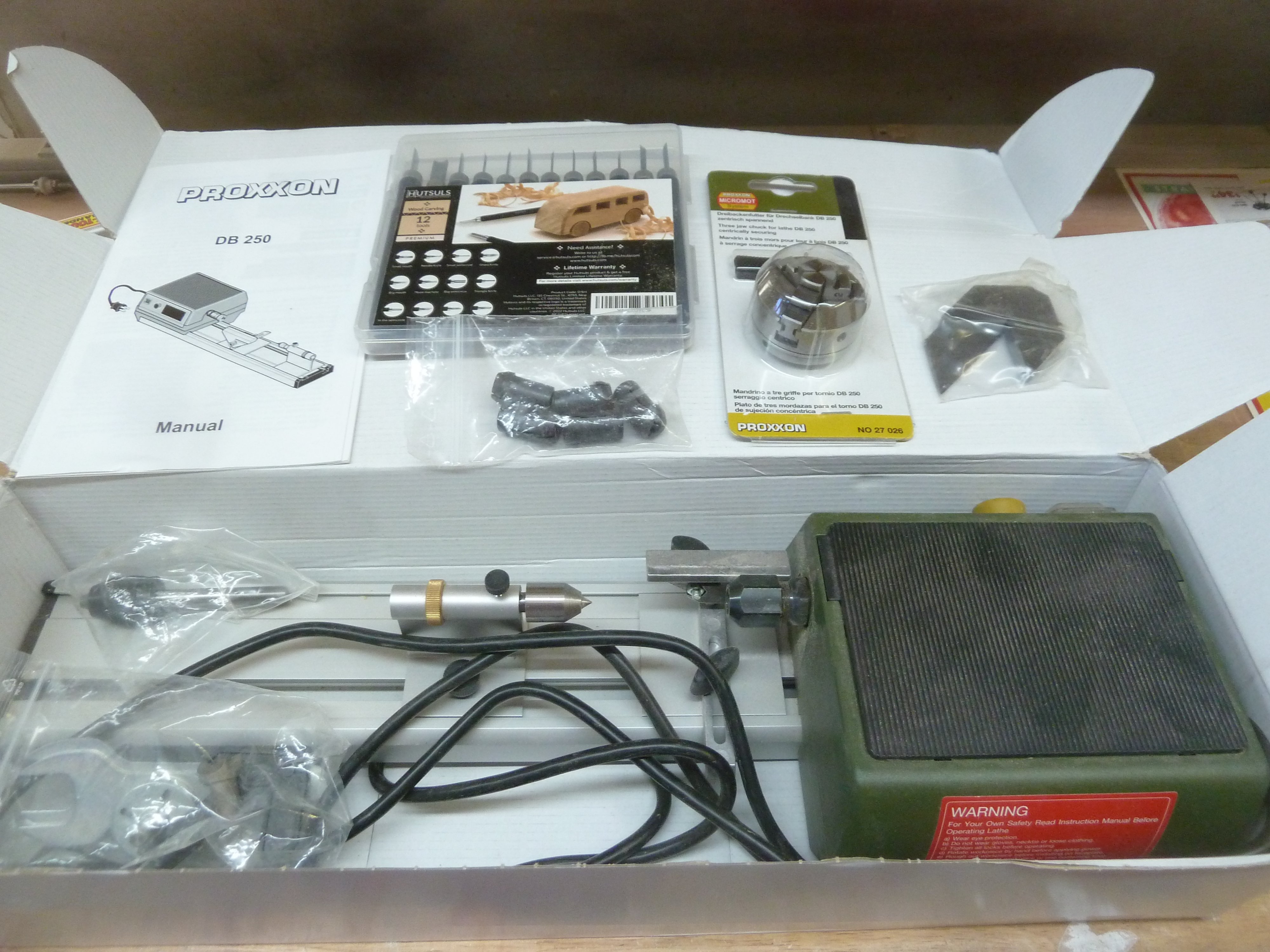
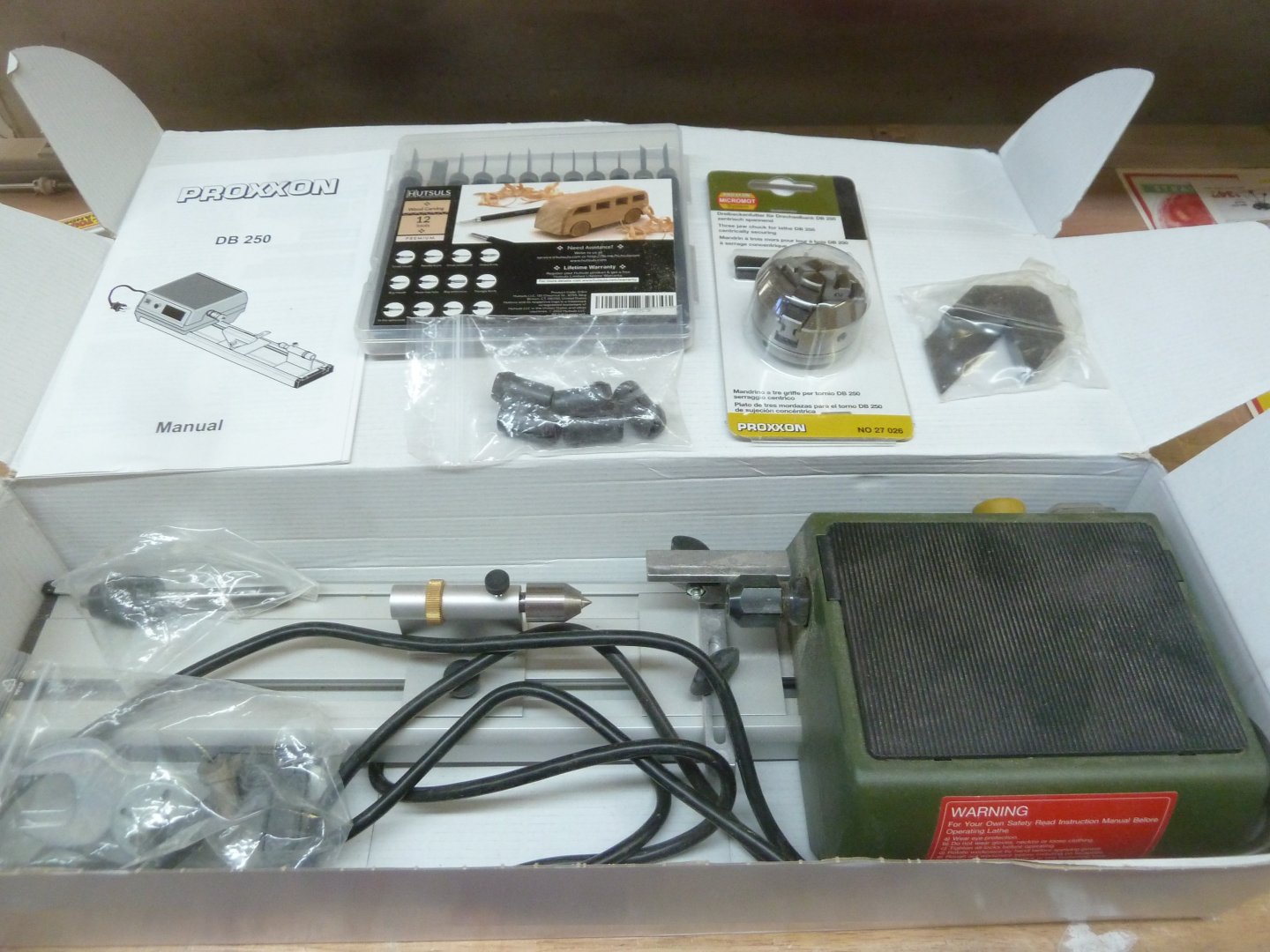
Up for sale is a Proxxon Woodturning Lathe DB250 plus extras. The Lathe come with the Proxxon 3-Jaw Chuck, wood turning chisels, and a MicroMark center. $245 shipped CONUSA. -- PROXXON LATHE HAS BEEN SOLD -- Also, up for sale is a Proxxon Micromot Drill Stand. $80 shipped CONUSA. Both items used sparingly. PayPal preferred and thanks for looking.



-
- 1
-
-
CiscoH reacted to a post in a topic:
Ultimation Modeling Products Slicer and Sander (SOLD)
-
Ryland Craze reacted to a post in a topic:
Ultimation Modeling Products Slicer and Sander (SOLD)
-
Up for sale is a Ultimation Chopper and Ultimation Sander in excellent condition, used sparingly. Asking $250 plus shipping for the pair. I would prefer to sell the pair but individually, the Sander is $150 plus shipping and the chopper is $125 plus shipping. Shipping in the USA is preferred. Thanks for looking. Sorry about the poor photography. PayPal preferred.


-
- 2
-
-
If interested in a Ropewalk, follow this link: https://fb.watch/zQsO82nD-P/ Very impressive.
- 1 reply
-
- 2
-
-
ir3 reacted to a post in a topic:
HMS Winchelsea 1764 by shauer - 1:48
-
ir3 reacted to a post in a topic:
HMS Winchelsea 1764 by woodartist - 1:48
-
ir3 reacted to a post in a topic:
HMS Winchelsea 1764 by woodartist - 1:48
-
ir3 reacted to a post in a topic:
HMS Winchelsea 1764 by woodartist - 1:48
-
ir3 reacted to a post in a topic:
HMS Winchelsea 1764 by woodartist - 1:48
-
ir3 reacted to a post in a topic:
HMS Winchelsea 1764 by woodartist - 1:48
-
ir3 reacted to a post in a topic:
HMS Winchelsea 1764 by woodartist - 1:48
-
ir3 reacted to a post in a topic:
HMS Indefatigable 1794 by Glenn-UK - FINISHED - Vanguardodel Ms - 1:64
-
ir3 reacted to a post in a topic:
HMS Indefatigable 1794 by Glenn-UK - FINISHED - Vanguardodel Ms - 1:64
-
ir3 reacted to a post in a topic:
HMS Indefatigable 1794 by Glenn-UK - FINISHED - Vanguardodel Ms - 1:64
-
Glenn-UK reacted to a post in a topic:
HMS Indefatigable 1794 by Glenn-UK - FINISHED - Vanguardodel Ms - 1:64
-
I have a question early in the build. When the printed lower deck is installed, the gratings assembled, and the ladder is built, should WOP or some other coating be put on or just leave the wood bare. Thanks, Iran Ausley
-
 Archi reacted to a post in a topic:
Selling Shop Tools
Archi reacted to a post in a topic:
Selling Shop Tools
-
mtaylor reacted to a post in a topic:
Selling Shop Tools
-
Keith Black reacted to a post in a topic:
Selling Shop Tools
-
mtaylor reacted to a post in a topic:
Selling Shop Tools
-
I am parting with my shop tools and am starting with Ultimation Sander, Sander Repeater, and Slicer. The Sander and Slicer have been used sparingly and are in perfect condition. Asking $125 plus shipping for the Slicer and $240 plus shipping for Sander with Repeater. $350 plus shipping for both. More to follow. Please ask questions and thanks for looking.



- 1 reply
-
- 3
-
-
-
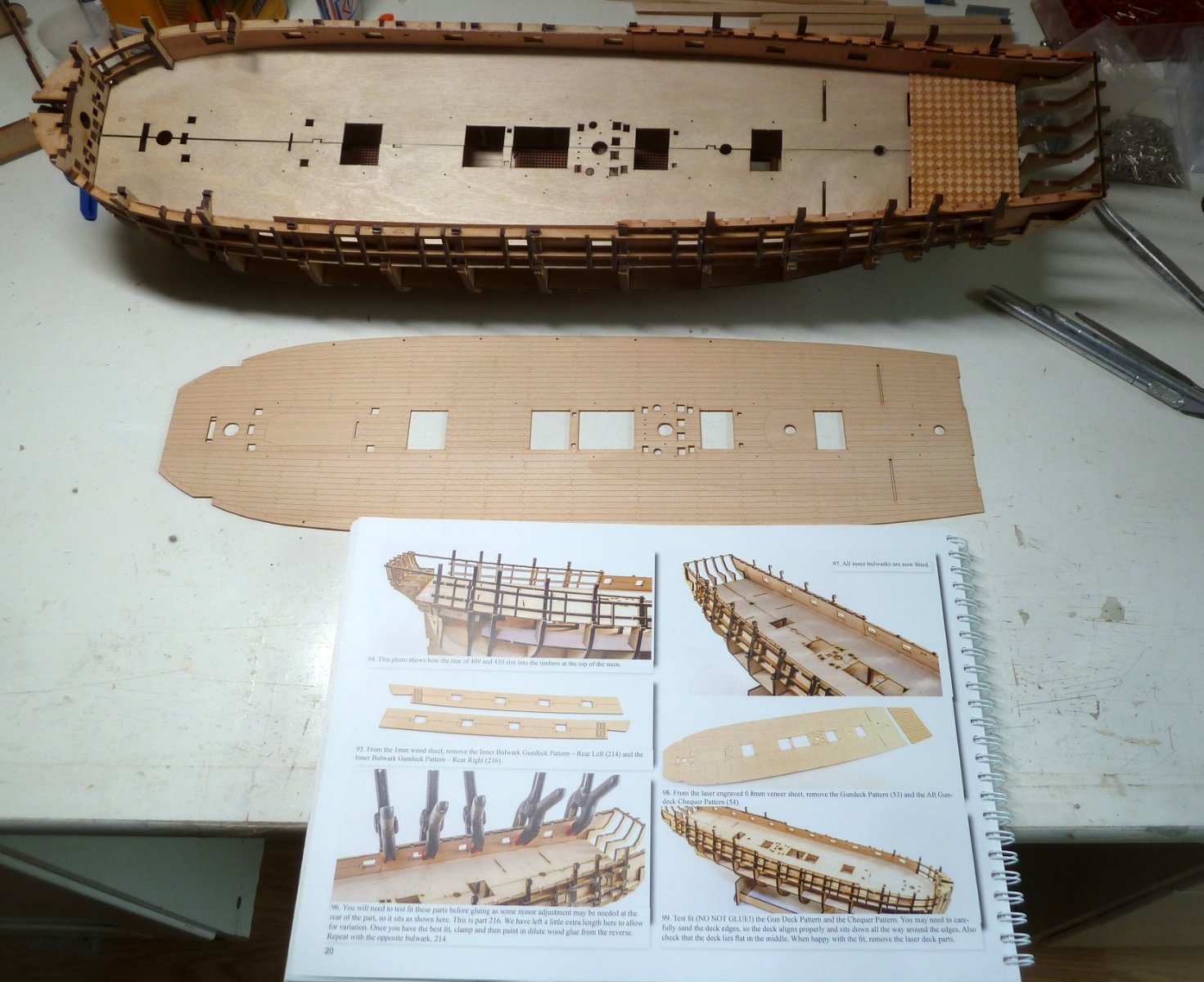
The deck is installed. A few minor areas needing repair but at least in place. I experienced most of the glitches pointed out in earlier posts. Now to move on. Thanks for all of the suggestions.

-
Thanks for all the input on handling the installation of the Gundeck. Much appreciated.
-
I will do that. Thanks for the suggestion.
-
It could be anything. Wood too dry, a flaw in the grain. Chris suggested scribing a line down the middle to help prevent a crack while bending the Gundeck Pattern. Of course, I could have been a bit aggressive. In any case, once the glue dries, I will try again.
-
Thanks James, easier said than done. I now have a crack going halfway down the deck from the stern. When flexing the deck to set it down one is pretty lucky if the deck doesn't split. So, now to repair the crack and try again. Easily said on paper but not so easy to accomplish.
-
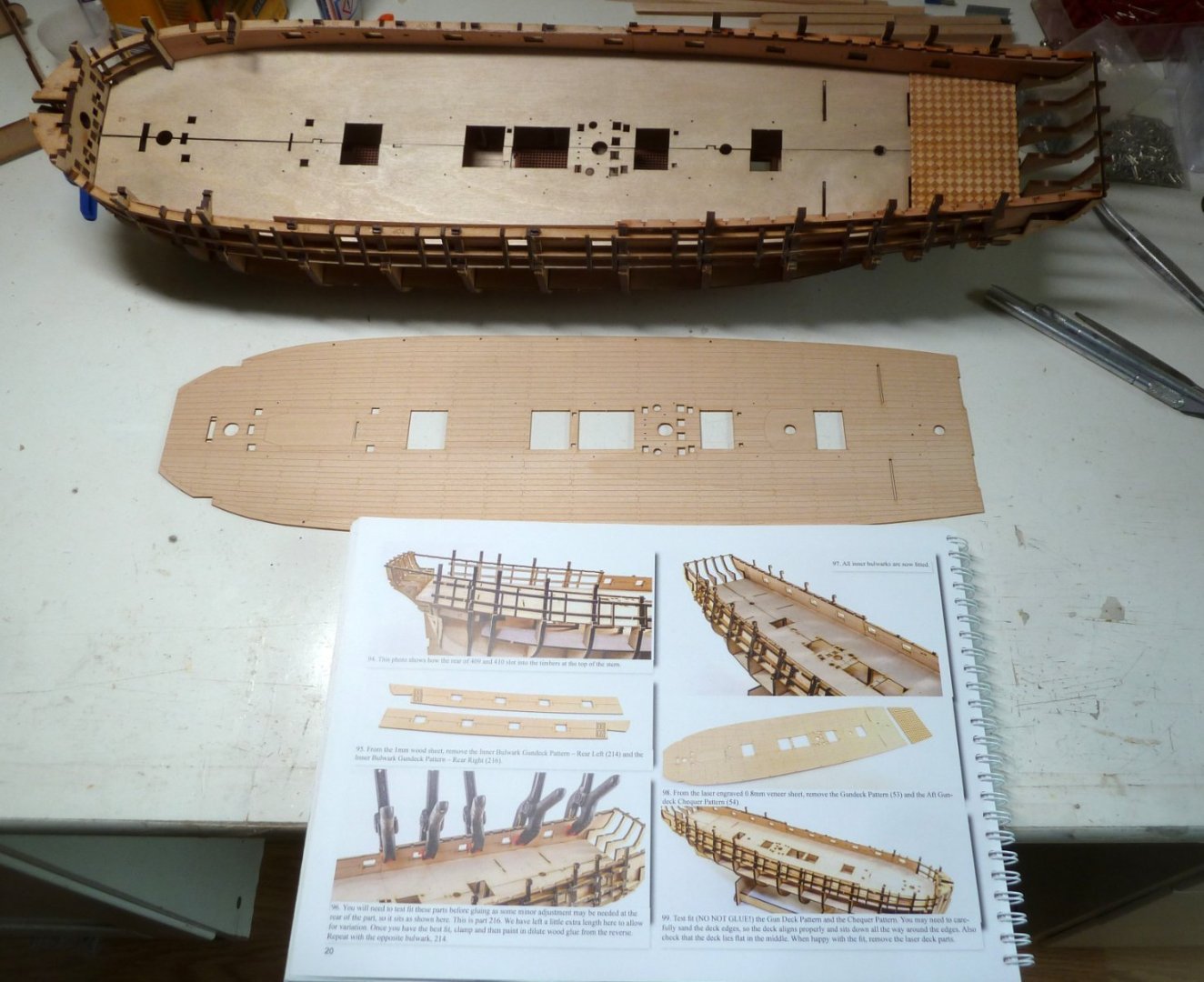
I am at step 99 in the builder's guide. I didn't start the thread from step 1 as this has been covered by several of the modelers doing this build. I waited until I ran into a problem and need to get some advice. I fitted the checkerboard pattern but when it came to the gundeck pattern, not sure how to test fit it. I am afraid to bend it so it can be dropped in. Once it is in, places it must be trimmed to fit will be evident but then how to get it back out again. Totally flummoxed. Any suggestions would be appreciated. Thanks in advance.
-
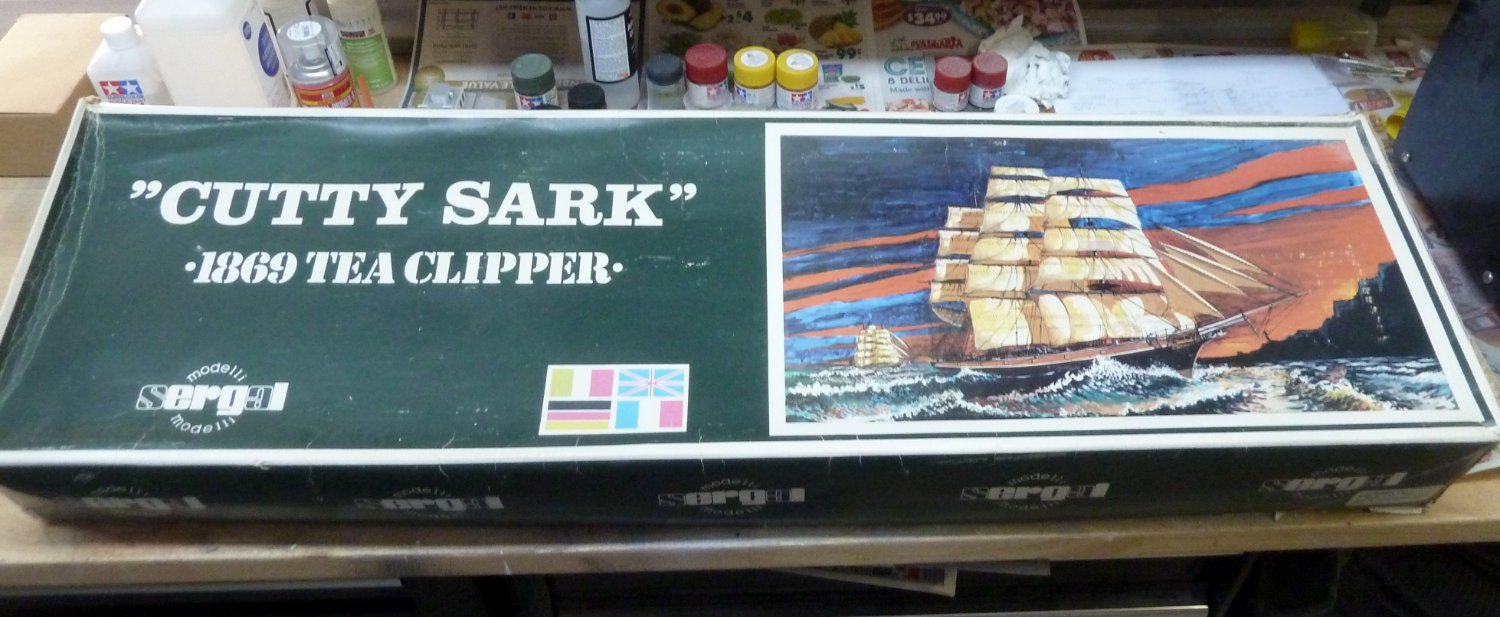
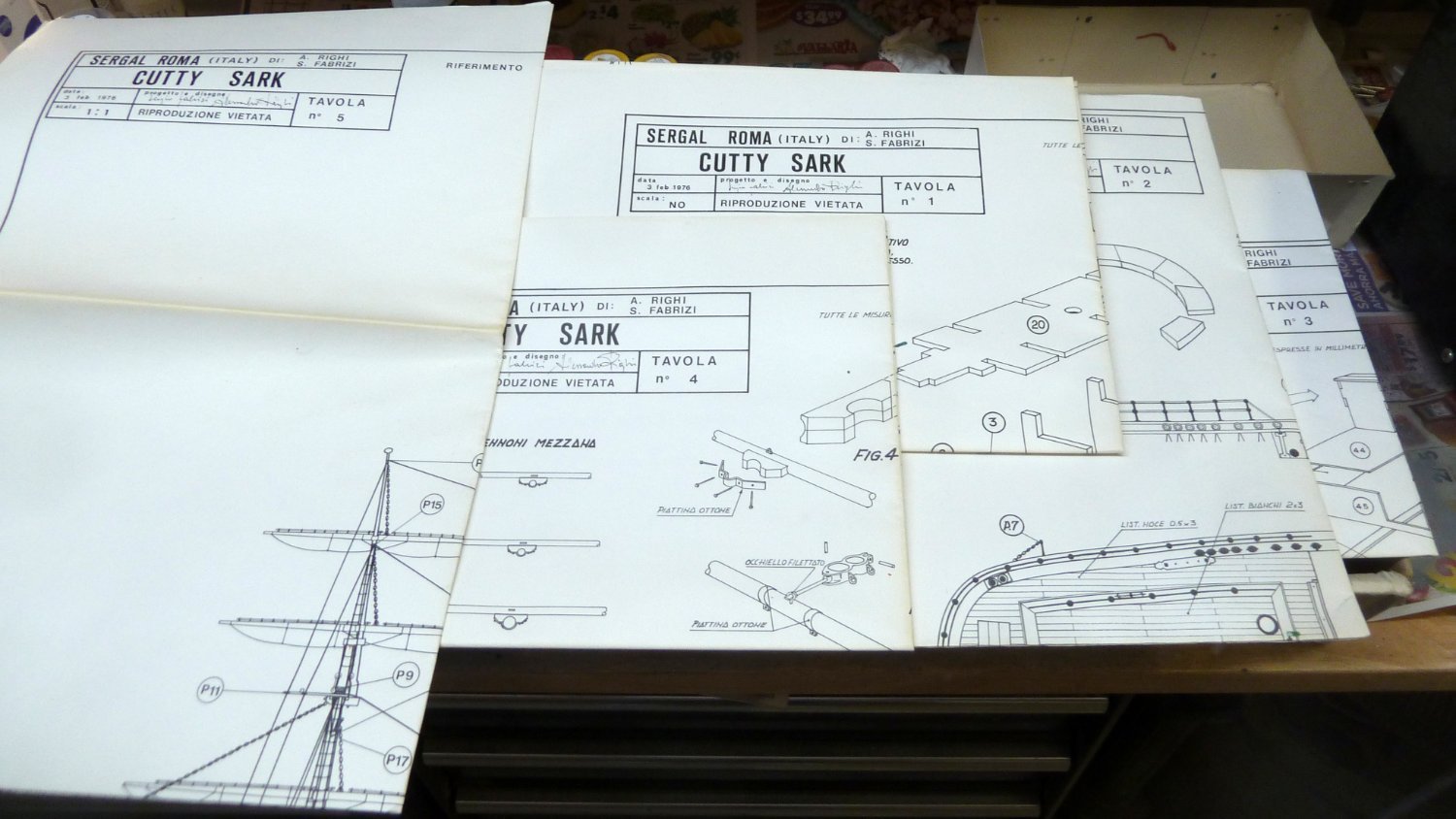
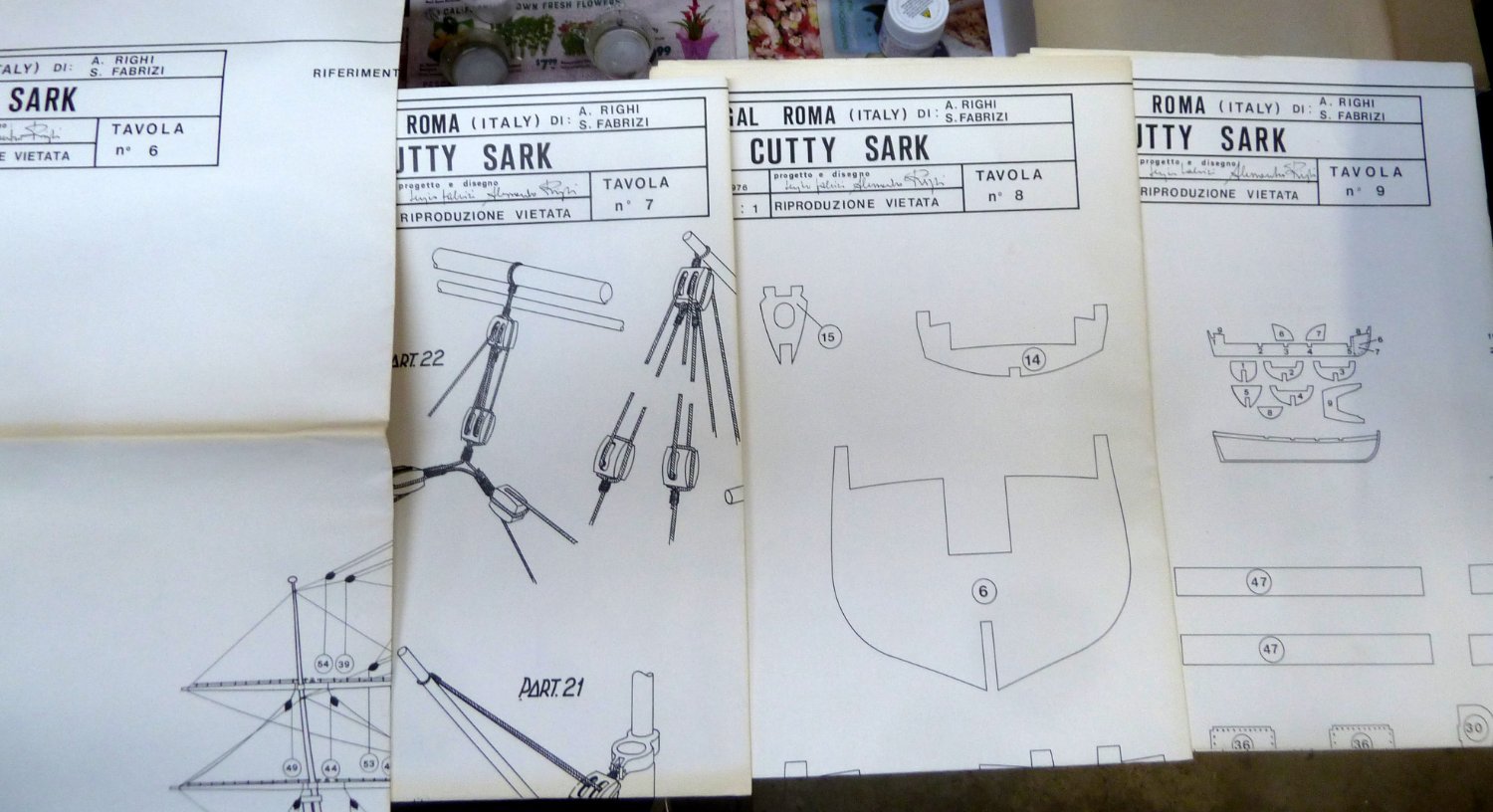
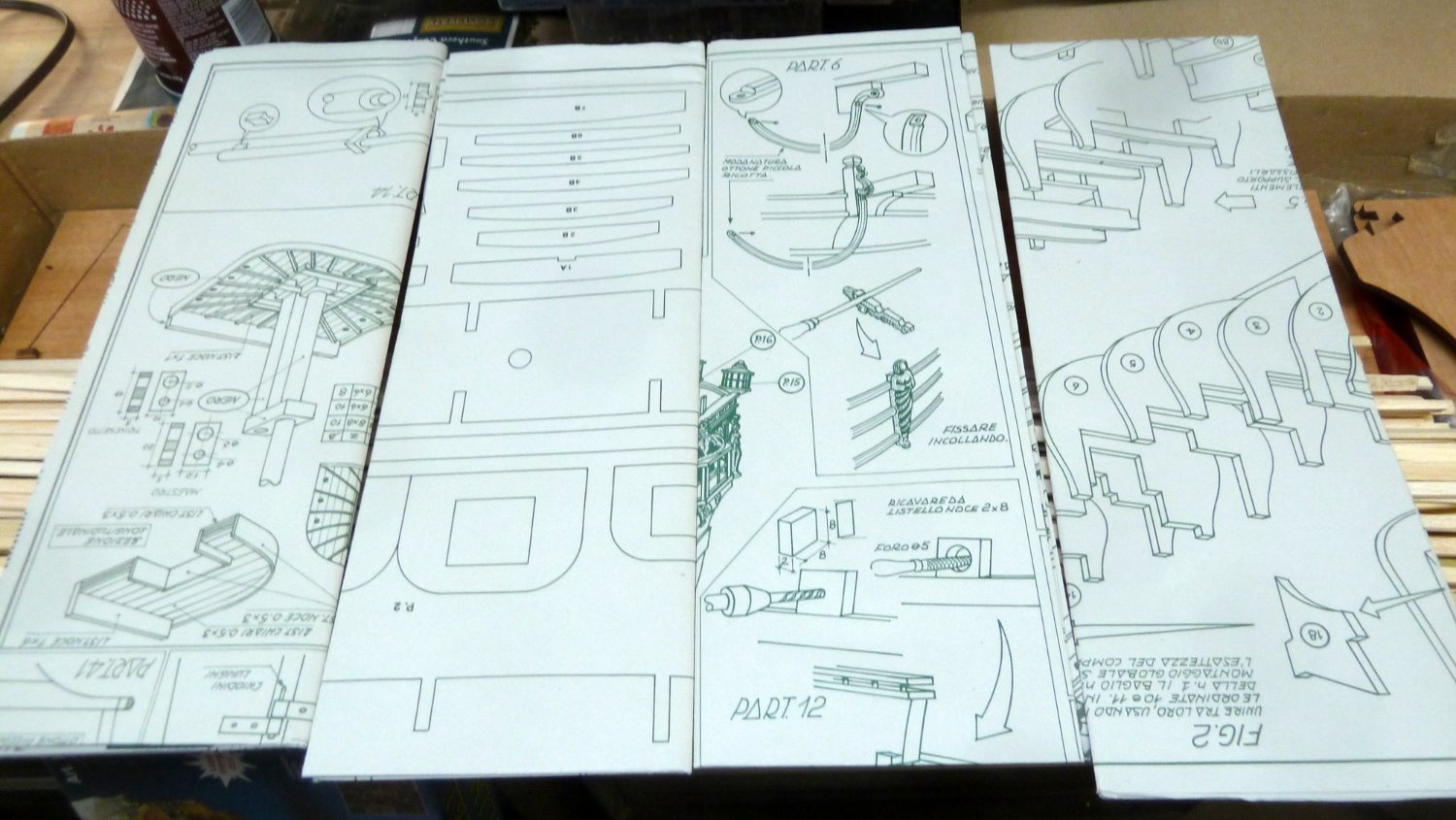
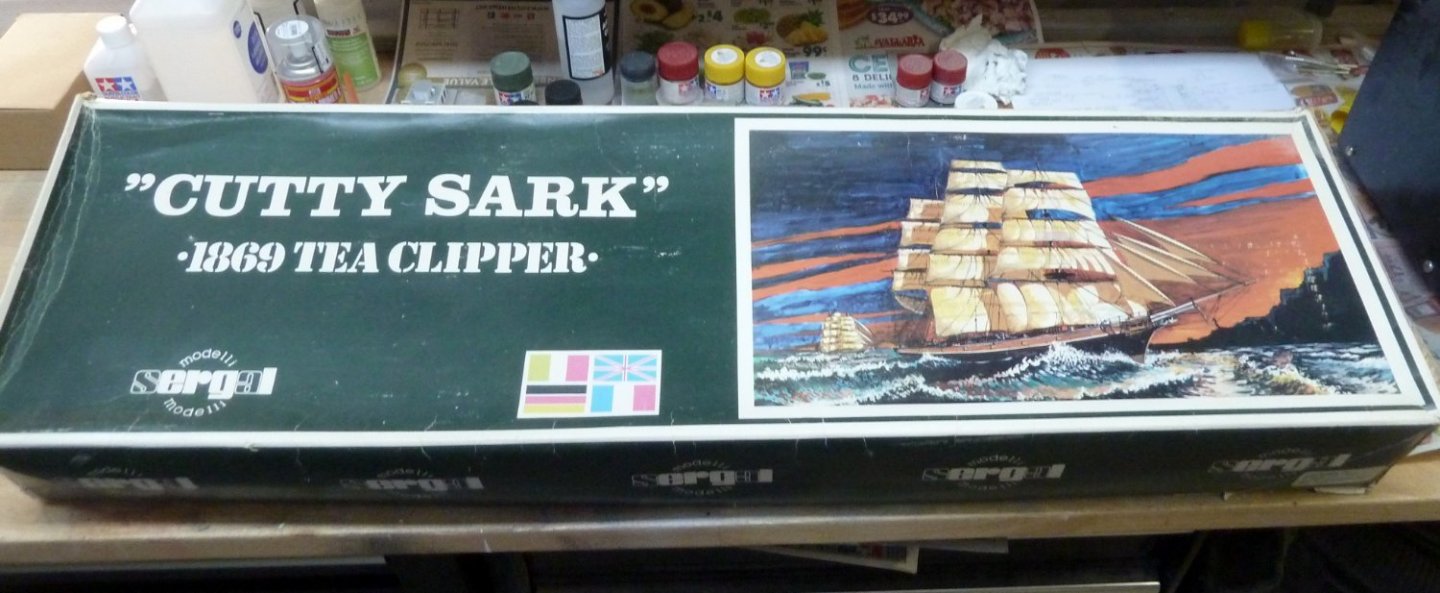
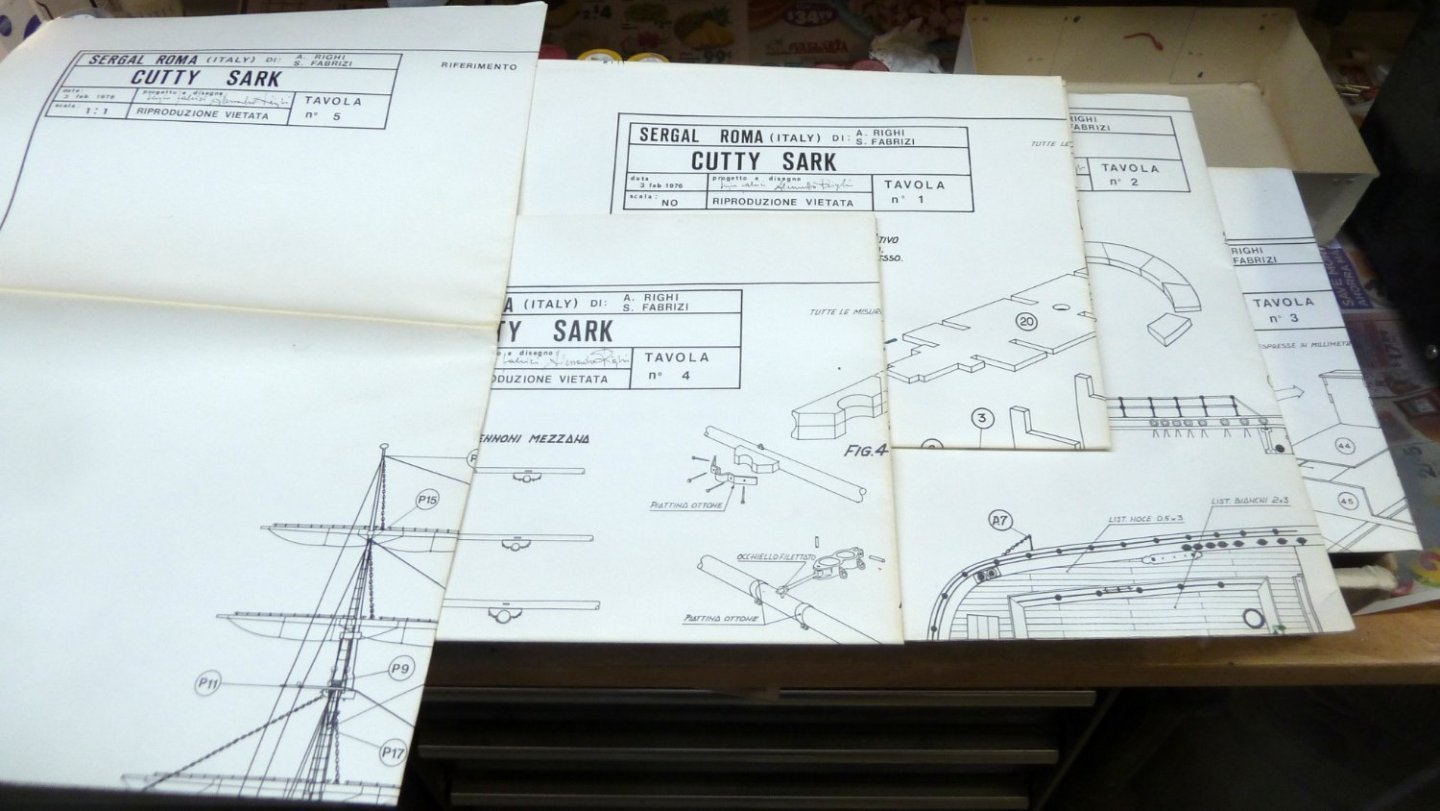
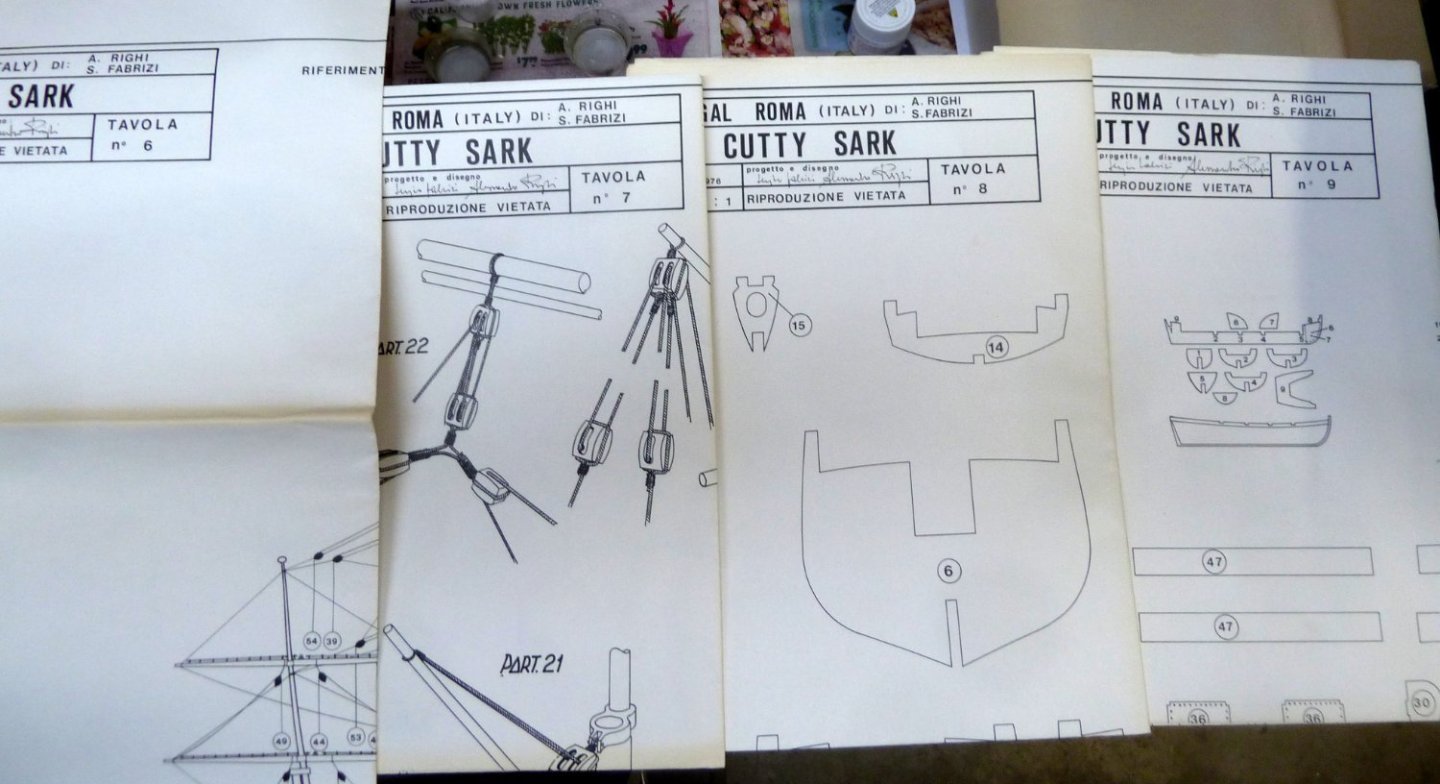
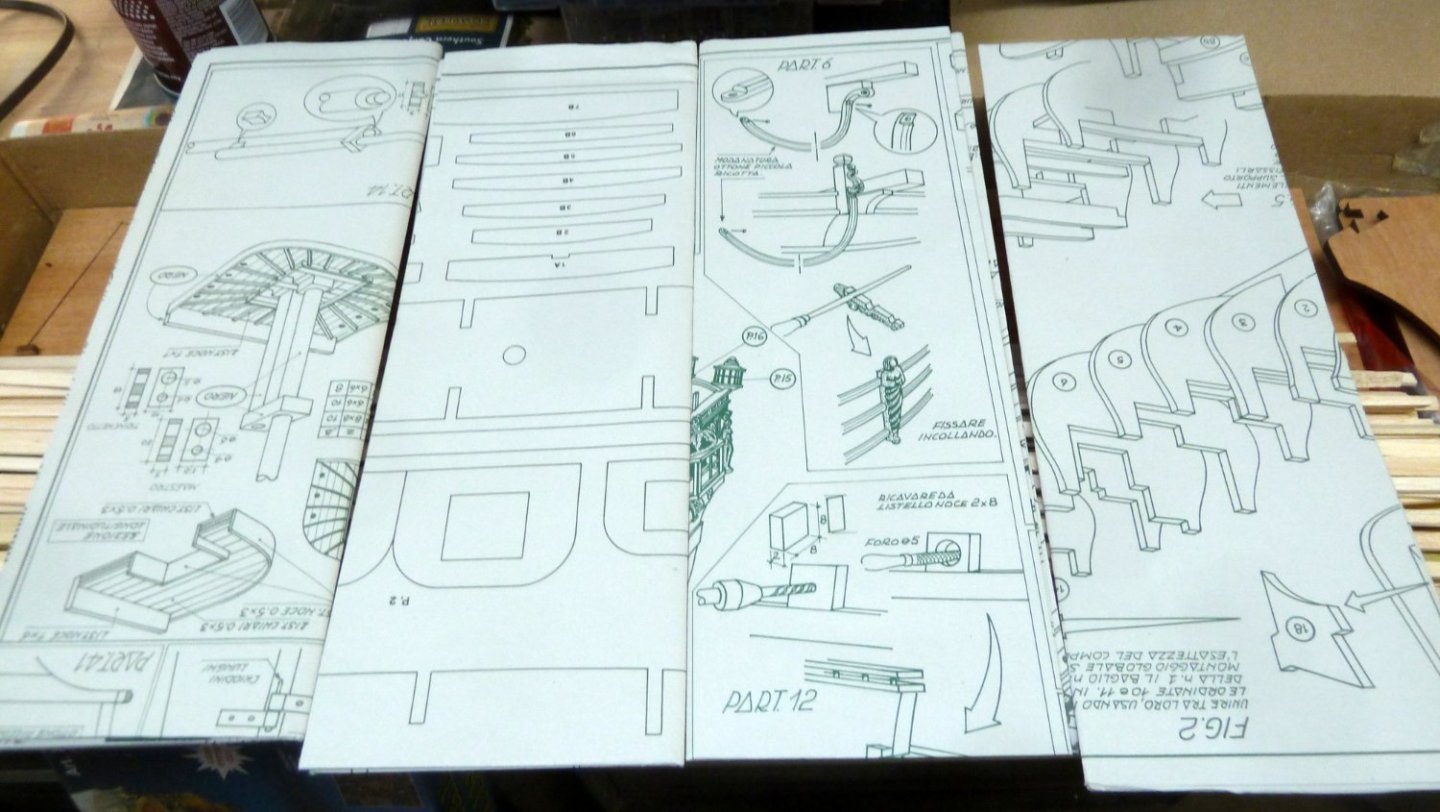
I am parting with a very old Sergal Cutty Sark kit. This kit is from the best of Sergal. There are 9 very detailed plan sheets. The stick wood, deck, and frames are excellent with no warpage, The fittings are exemplary and includes the copper plating for the hull. The decorations are cast and not photo etch. The Bulwarks are in PE and I will be happy to open the package and show the pieces if needed. I will include Lusci's book and Longridges 2-part, 1 volume book "Cutty Sark Last of the Tea Clippers". Asking $300 plus shipping CONUSA. If there is some interest outside of CONUSA, the kit box is 36" x 11" x 5" and weighs approximately 15lbs. You can calculate shipping from Postal Code 91307, USA. Please ask questions and thanks for looking.





-
- 1
-
-
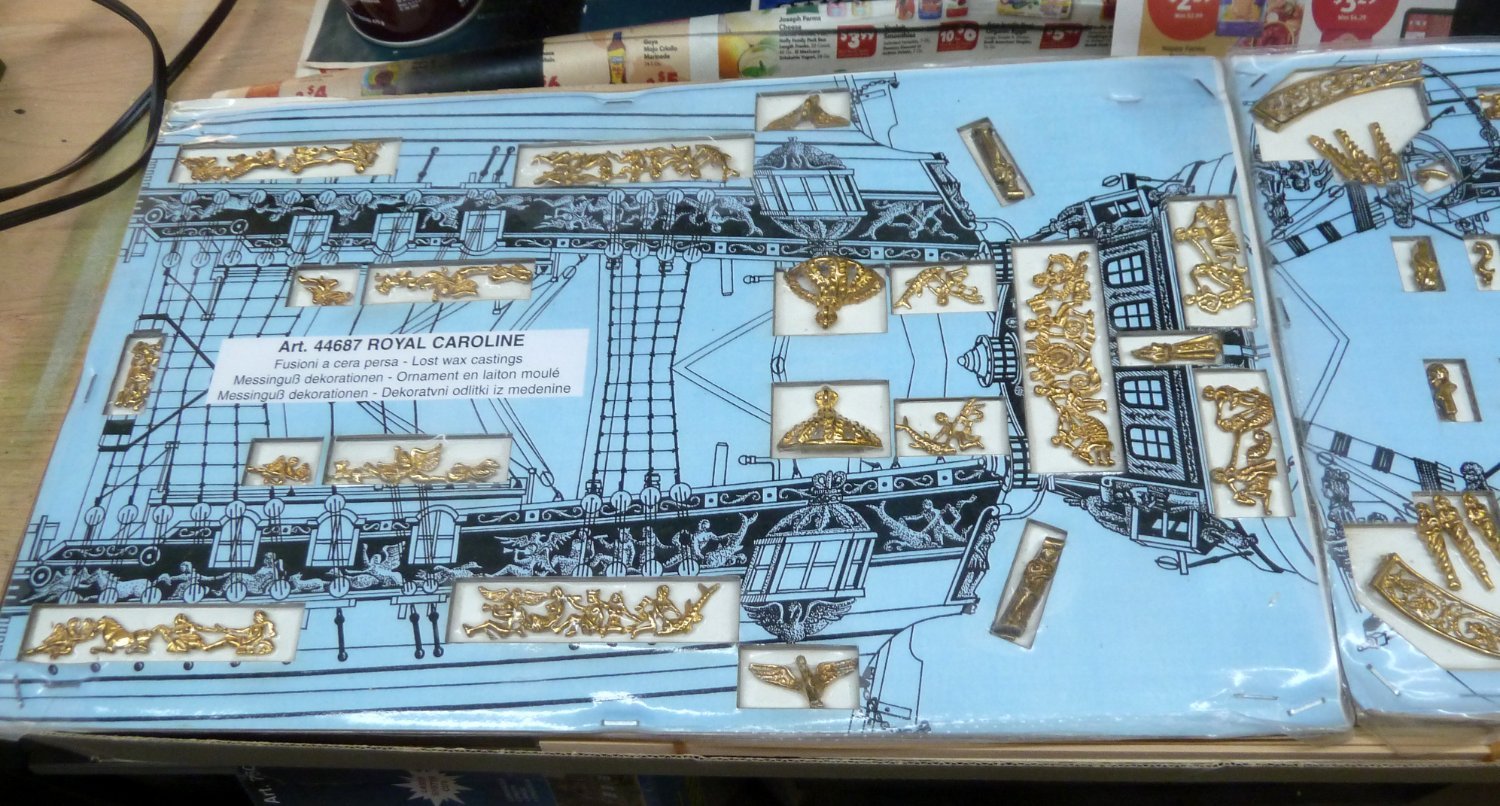
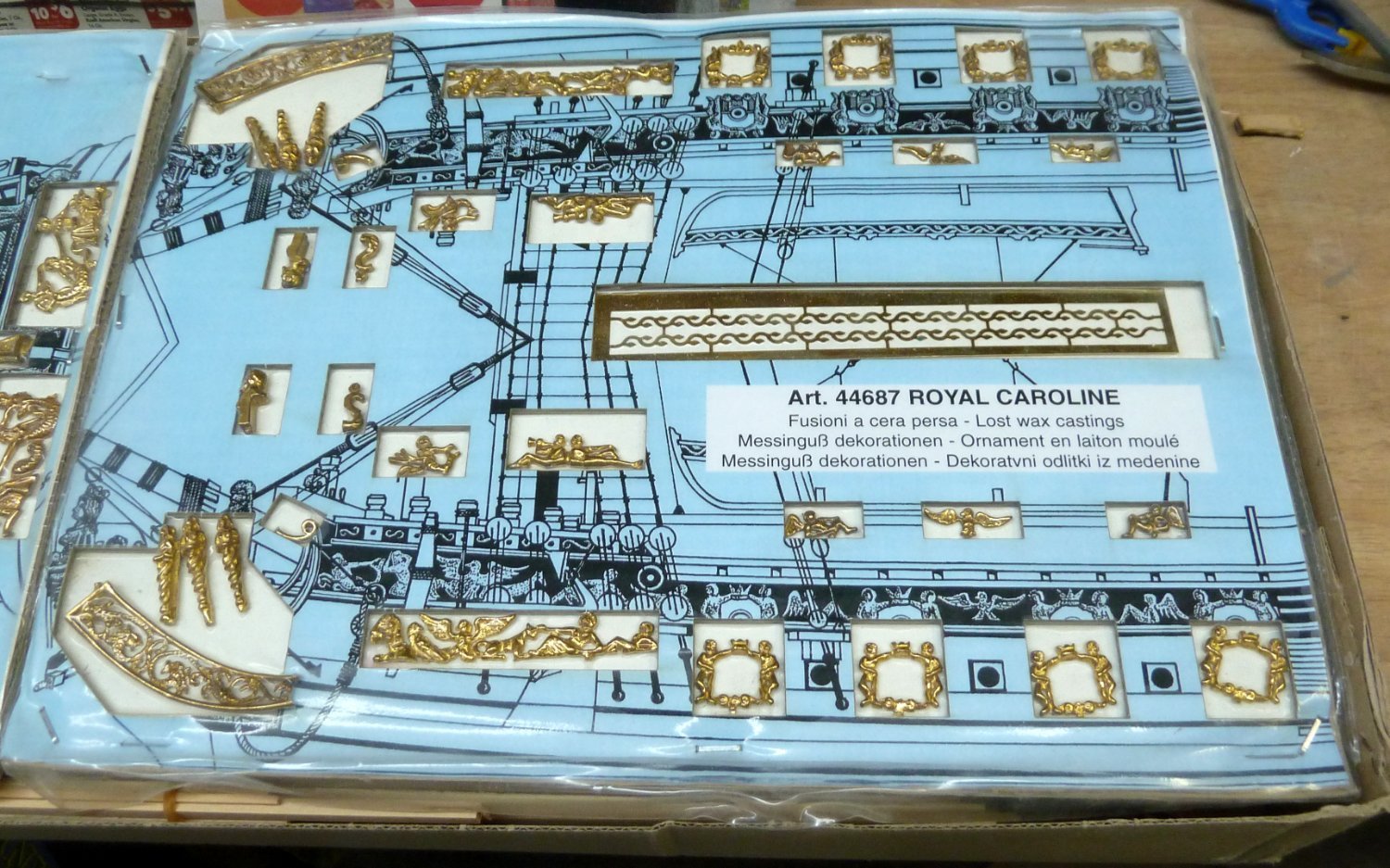
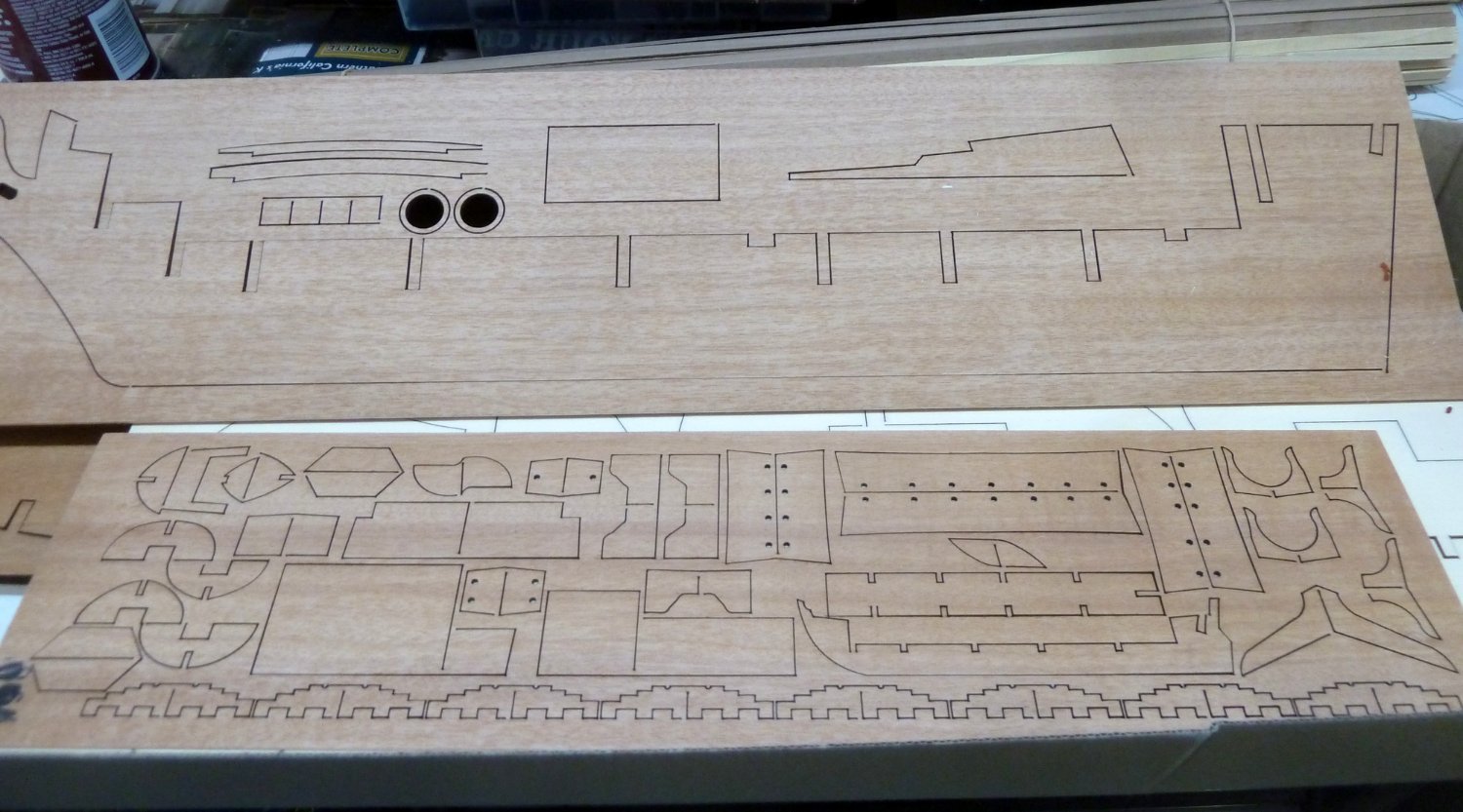
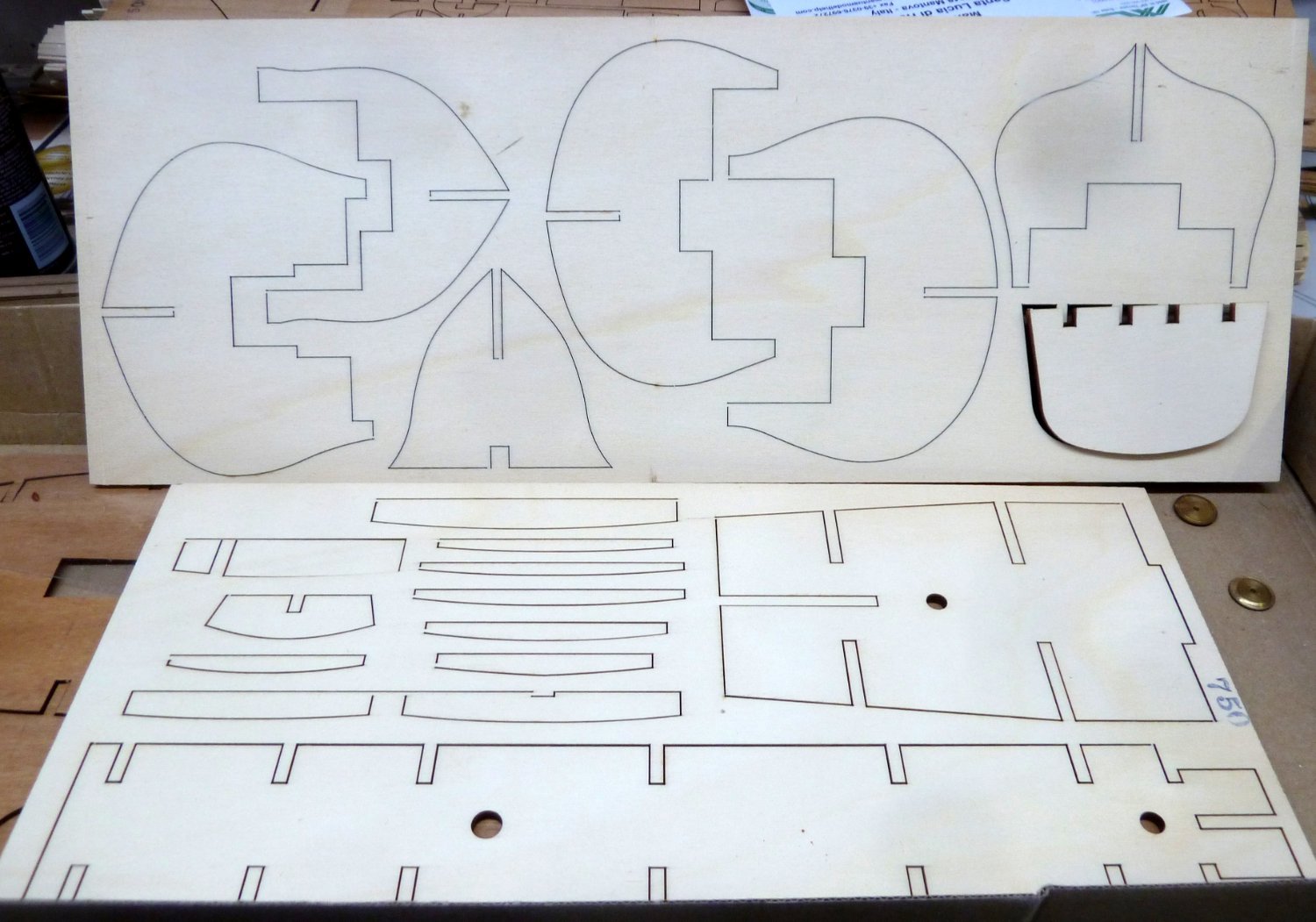
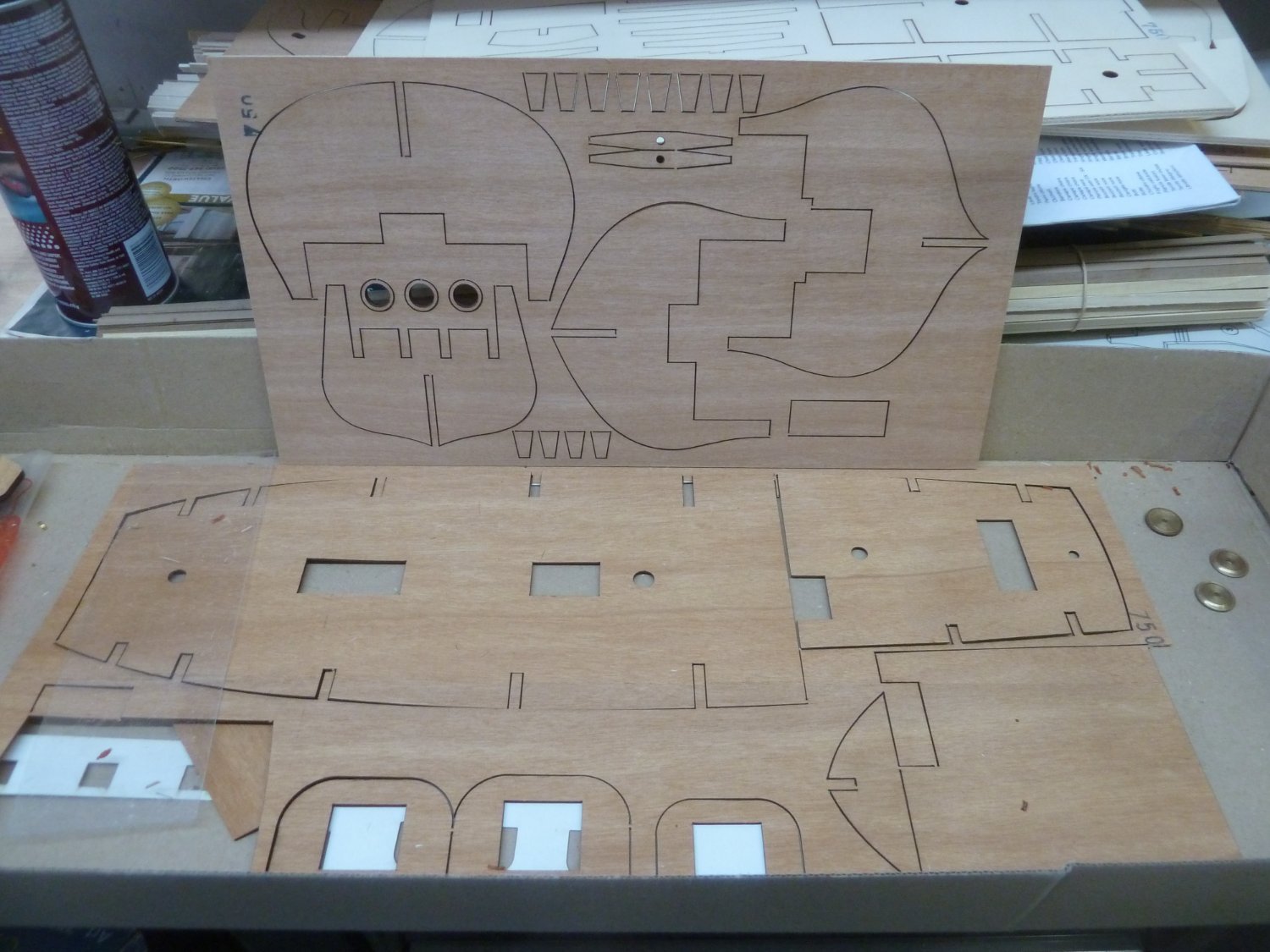
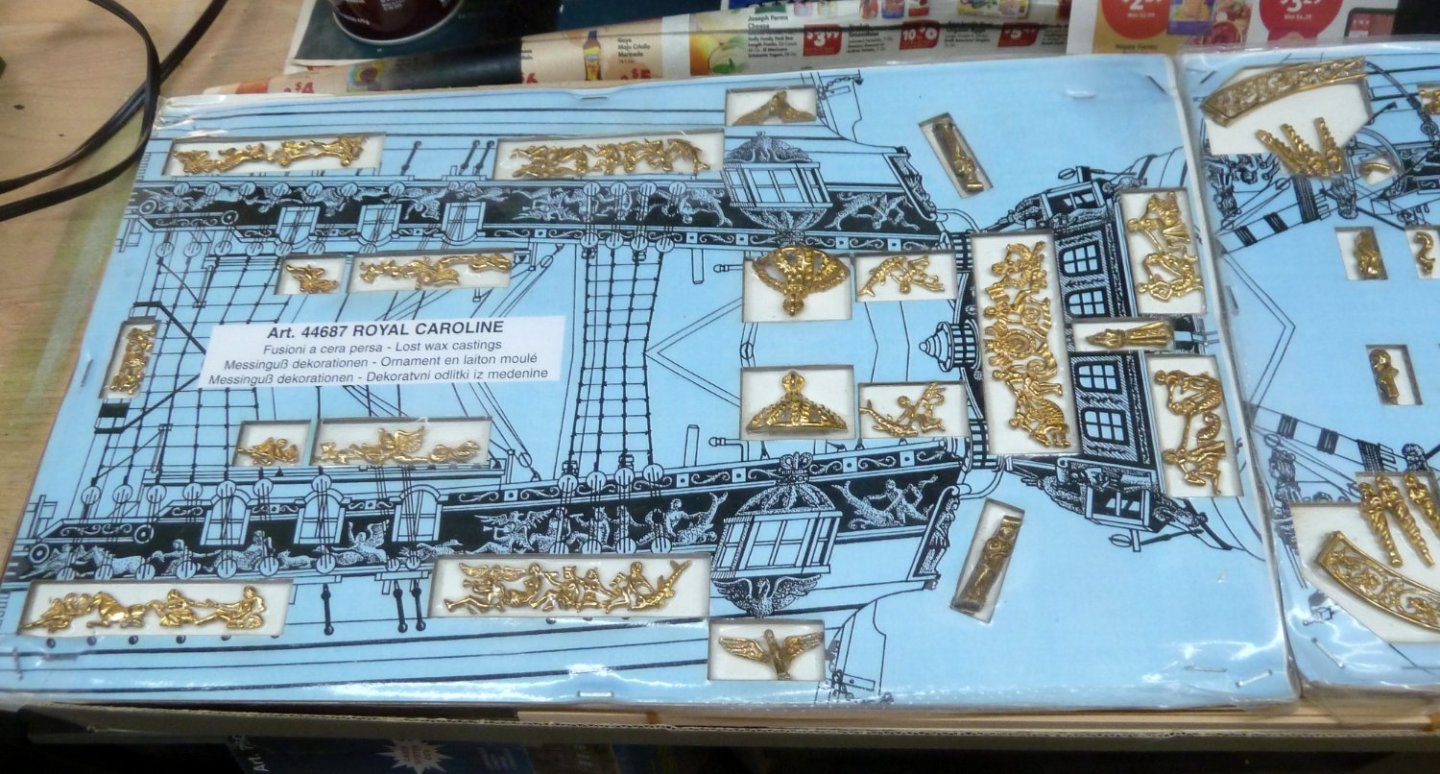
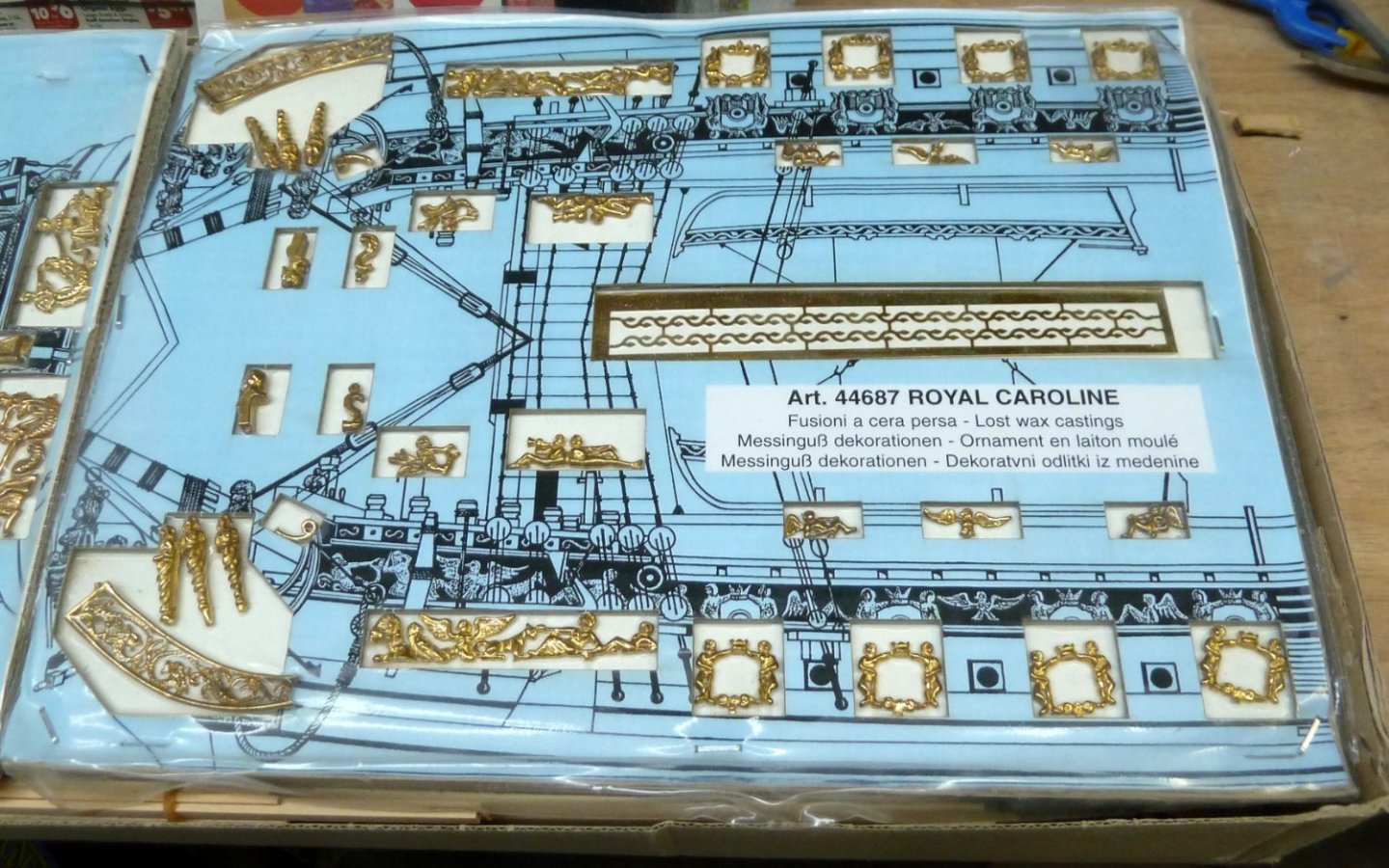
Earlier in the year I purchased the Panart 1:47 Royal Caroline kit from a fellow modeler. I have decided to stop working on wooden ship models and continue with my RC Electric and Steam powered boats. The kit was originally purchased from Model Expo in 2007 and is still in excellent condition with no warping of any of the wood as the pictures will show. I am asking $300 for the kit plus shipping. Instructions included but not in pictures. Note that some parts have separated from the die cut sheets. Questions welcomed and thanks for looking.


-
- 4
-